Heracles: Bridging Precise Tracking and Generative Synthesis for General Humanoid Control
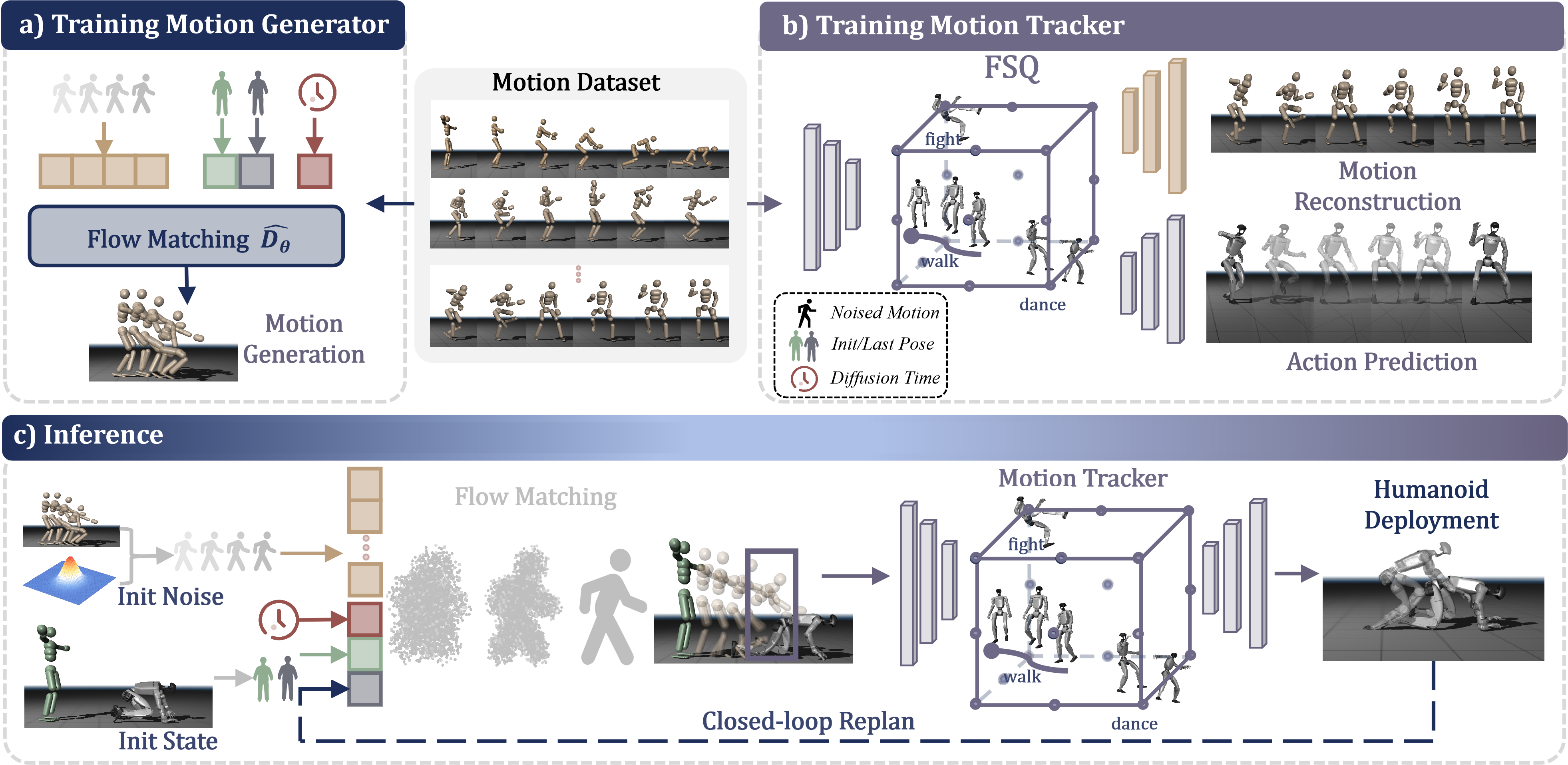
Heracles. A state-conditioned diffusion middleware that bridges precise motion tracking and generative synthesis for general-purpose humanoid control.